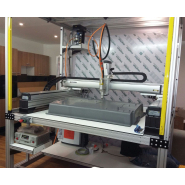
Robot portique cartesien en 3 axes XYZ et 4 axes WYZR, idéal pour les applications mono et bi-composants, utilisé dans les domaines de l'agro-alimentaire, cosmétique, horlogerie, automobile...
Obtenir un devis / prix
Prix et détails sur demande
Mr. Jean Baptiste Tur
Echanger avec le vendeur
Vendu
par ROBOCOL
En savoir plus









Description
Robots portiques cartesiens en 3 axes XYZ et 4 axes WYZR. Spécialisés pour les pièces lourdes ou très encombrantes qui restent stabilisées lors du dosage. Idéals pour les applications mono et bi-composants. Ces robots travaillent en 3 dimensions Y, Y, Z et/ou R, grâce à leurs axes linéaires qui se déplacent simultanément en interpolation linéaire et circulaire. Intégration simple au dessus d'un convoyeur ou plateau rotatif. Programmation par apprentissage direct ou par PC. Domaine d'utilisation : agro-alimentaire cosmétique horlogerie automobile électronique optique médical plasturgie
Produits similaires dans la catégorie qui peuvent vous intéresser

Prix sur demande
Vendu par : New Mat Mecatronics
Vendeur certifié
Les robots YamahaRobots industriels YAMAHA : une gamme de robots scara, de robots cartésiens et d'axes électriques Les robots Yamaha La gamme de robots industriels Yamaha, dont New - Mat est le représentant exclusif en France regroupe des axes linéaires, des robots cartésiens, des robots scara.
Voir le produit

Prix sur demande
Vendu par : YASKAWA FRANCE
Le portique TSG est conçu pour des solutions fiables, précises et économiques destinées au soudage des engins de travaux publics, des containers, etc. Il est servo contrôlé et entièrement synchronisé avec l’armoire de commande. - Caractéristiques principales : - L’axe longitudinal Y d
Voir le produit

Prix sur demande
Vendu par : GHS Automation
Tous les axes avec AC servomoteurs Course X, Y et Z avec guidage linéaireFidélité de répétition: ±0,1mmPoids du système de préhension/pièce: jusqu'à 3 kgTension de secteur: 230/115 V (50/60 Hz)Puissance absorbée: 350 VABranchement pneumatique: 6 bar, consommation env. 0.5 Nl/cycle (sans v
Voir le produit

Prix sur demande
Vendu par : Trioptics France
Un robot XY consiste en un manipulateur monté sur un système aérien et permet de se déplacer sur un plan horizontal. Les robots cartésiens sont également appelés robots portiques ou linéaires et sont généralement de grands systèmes construits avec des rails de guidage linéaires qui effec
Voir le produit

Prix sur demande
Vendu par : Trioptics France
Un robot XY consiste en un manipulateur monté sur un système aérien et permet de se déplacer sur un plan horizontal. Les robots cartésiens sont également appelés robots portiques ou linéaires et sont généralement de grands systèmes construits avec des rails de guidage linéaires qui
Voir le produit

Prix sur demande
Vendu par : SCHMIDT TECHNOLOGY SAS
Sur la base des modules ServoPress SCHMIDT® de haute précision, dans une gamme de force allant de 0,5 à 100 kN, nous avons conçu une machine d'assemblage cartésienne pour les opérations d'assemblage entièrement automatiques dans de nombreux secteurs. Il devient ainsi possible d'assembler des
Voir le produit

Prix sur demande
Vendu par : Trioptics France
Un robot XY consiste en un manipulateur monté sur un système aérien et permet de se déplacer sur un plan horizontal. Les robots cartésiens sont également appelés robots portiques ou linéaires et sont généralement de grands systèmes construits avec des rails de guidage linéaires qui effec
Voir le produit

Prix sur demande
Vendu par : GHS Automation
Assistance confortable pendant l'ajustage Grand confort d'utilisation Axe Y léger et rapide grâce à la technologie fibre de carbone Fiabilité indéfectible Pour des presses d'injection jusqu'à 2500 kN Tous les axes à entraînement pneumatique Fidélité de répétition: ± 0,5 mm Poids du syst
Voir le produit

Prix sur demande
Vendu par : Robsytech SAS
Robot cartésien 2 axes Pick and Place YAMAHA - série YP - X - Idéal pour des opérations de pick and place de petits composants à grande vitesse, dans un encombrement réduit. - Les robots de la série YP sont des robots de type 'cartésien', et existent en versions 2 axes, 3 axes et 4 axes ,
Voir le produit

Prix sur demande
Vendu par : Trioptics France
Un robot XY consiste en un manipulateur monté sur un système aérien et permet de se déplacer sur un plan horizontal. - Les robots cartésiens XY sont également appelés robots portiques ou linéaires et sont généralement de grands systèmes construits avec des rails de guidage linéaires qui
Voir le produit

Prix sur demande
Vendu par : LUCAS FRANCE
Vendeur certifié
Les robots cartésiens deux axes ou portiques robotiques LUCAS permettent de desservir de façon aérienne de multiples zones de travail réparties sur de longues distances.Notre gamme de robots cartésiens deux axes peuvent être équipés d’un ou plusieurs robots polyarticulés ou d’un bras Z
Voir le produit
 Yaskawa")
Prix sur demande
Vendu par : YASKAWA FRANCE
La série RM2 (STN) est un positionneur à 2 stations pour les pièces qui nécessitent une rotation sur un axe. - Elle a été conçue pour une grande facilité d'utilisation, avec une hauteur de travail confortable pour le chargement/déchargement des pièces et est livrée complète avec un écr
Voir le produit

Prix sur demande
Vendu par : DOSEUROPE
Courses X/Y/Z (mm) 300 / 300 / 100 (±360°) - Poids embarqués, plateau / outil 11,0 kg / 6,0 kg / (3 kg) - Vitesses PTP X&Y/Z (mm/s) 800 / 320 / (720°/sec) - Répétitivité +/ - 0,02 mm / Axe - Résolution 0,01 mm / Axe / (R±0,1°) - Mémoire 100 Programmes 4000 lignes / Programme -
Voir le produit
Obtenez des devis
pour plusieurs produits à la fois
1
Vous décrivez rapidement votre besoin de matériel
2
Nous sélectionnons les meilleurs fournisseurs pour votre projet
3
Vous recevez des premières propositions sous 48h
Sur combien d'axes souhaitez-vous effectuer le déplacement ?
ROBOCOL
Vendeur certifié
France, Chanteloup Les Vignes, (78) Ile-de-France
ROBOCOL est sur Hellopro depuis 16 ans
Fort d’une longue expérience dans le dosage et la robotique, Robocol met à votre service, toute une gamme innovante de matériel et système de dosage (applicateur doseur, valve de dosage...), robot industriel (robot de manipulation, robot de dosage, robot de dépose de colles, robot d'assemblage, robot de vissage, robot de soudage... ) et consommables (seringues, aiguilles...). Ce matériel de dosage est destiné à la pose et dépose de tous types de liquides ou pâteux , mono ou bi-composants : Cyanoacrylate, anaérobie, acrylique, époxy, silicone, MS polymère, RTV, résine UV, polyuréthane, graisse, encre, vernis, alcool, etc….et ce afin de réaliser précisément des points, des cordons, du remplissage et de la pulvérisation.
Nous pouvons pomper, extruder, doser, déposer tous types de produits d’un point de quelques microlitres jusqu'à des débits de 250l/min et ce à partir de n’importe quel conditionnement d’origine : flacon, tube, cartouche, pot, bidon, seau, fût, container, etc….
Nous pouvons pomper, extruder, doser, déposer tous types de produits d’un point de quelques microlitres jusqu'à des débits de 250l/min et ce à partir de n’importe quel conditionnement d’origine : flacon, tube, cartouche, pot, bidon, seau, fût, container, etc….
Retrouvez nos conseils pour choisir
votre
robots cartésiens




Pas exactement ce que vous recherchez ? Requêtes associées





Exemples de demandes de devis
Pour la conception d'une chaîne de finition d'obus pour Nexter, nous avons besoin d'un robot cartésien 4 axes. i.e. les trois axes de translation un axe d'inclinaison de la tête. Notre objectif est d’accrocher à la tête du robot une buse d'imprimante pour que le robot nous permette d'imprimer, au jet d'encre, sur une surface semi-complexe. Cette surface est la surface d'un obus qui se trouve être par endroit inclinée.
Avez vous des robot capable de réaliser cela?
Si c'est la cas, pouvez-vous nous envoyer un devis?
Tristan M (Hyères - Var - 83)
je souhaite avoir le prix, les informations techniques concernant un robot cartésien 4 axes + baie de contrôle.
Course = 300 en X et Y
Course = 200 en Z
Charge embarquée = 1,5kg
Pilotage d'un 5ème axe éventuellement
Possibilité de fournir un changeur d'outil
Vitesse Max sur chaque axe?
Répétabilité, précision des mouvements?
Ludovic M (Le Port)