ROBOT QUADRUPEDE JUEYING MINI DEEP ROBOTICS NAVIGATION AUTONOME RECONNAISSANCE VISUELLE
Malheureusement, ce produit n'est plus disponible dans notre catalogue.
Devis pour produits similaires
Plusieurs devis en seulement 1 min
Produits similaires
Voir les produits


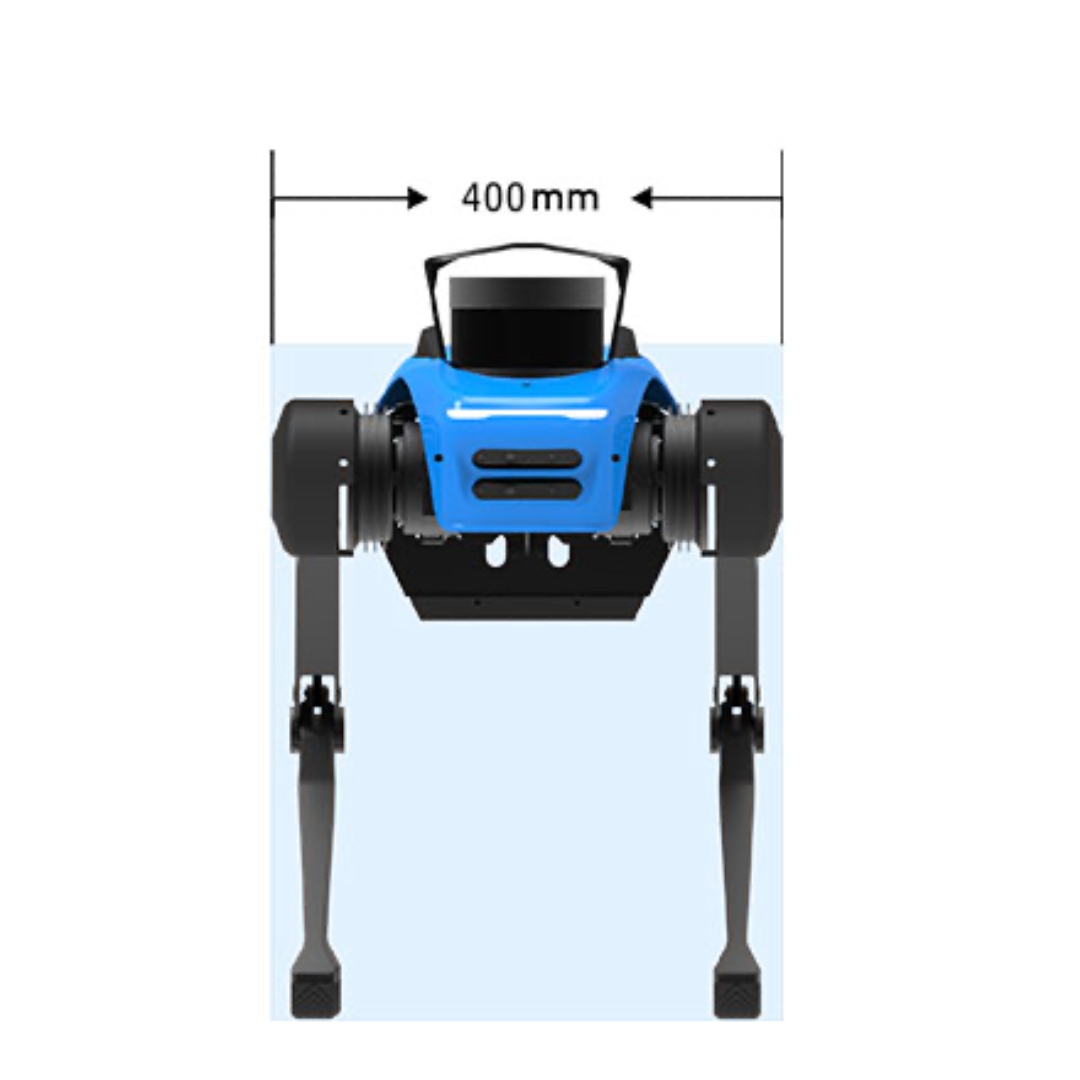



Jueying Mini est un robot quadrupède intelligent développé indépendamment par DeepRobotics. Le produit est composé d’un corps de robot, d’un système de conduite, d’un système de contrôle et d’un système de perception visuelle. Ses jambes adoptent une démarche de mouvement bionique, capable de marcher. Pour les capacités sportives telles que la marche et la course, chaque jambe a trois articulations de mouvement, et chaque articulation est entraînée par un moteur.
Jueying Mini ouvre le protocole de contrôle, qui est une plate-forme de système de robot intelligent qui peut être utilisée pour le développement secondaire
Paramètres Techniques Mini Jueying
Démarches Prises En Œuvre Du Développement
- Trot
- Flying-Trot
- Rythme
- Pronk
- Lié
- Gallop
- Soutenir le développement d’autres démarches hautes performances“
Développement de locomotives prises en charge
- Équilibrage sous perturbation de la force externe
- Autonome se lever après une chute
- Crawl, tête vers le haut, torsion du corps, etc.
INFORMATIONS COMPLÉMENTAIRES
- POIDS (KG) 23
- CHARGE PORTÉE (KG) 15
- HAUTEUR (MM) 500
- LARGEUR (MM) 400
- LONGUEUR (MM) 700
- BATTERIES (V / MAH) 14000mAh
- VITESSE EN AVANT MAX (M/S) 3
- DURÉE (H) 2
- LANGAGES DE PROGRAMMATION C++, Python
- CONNEXIONS / SIGNAUX OUTIL (E/S) RS485
- RAM (GO) 8
- SYSTÈMES D'EXPLOITATION Linux
- ANGLE DE DÉTECTION MAX (°) 35
- CONNEXIONS EtherCAT
- Capteur anticollision à infrarouges, LIDAR
- CRÉDIT PHOTO DeepRobotics
- ETAT / PRODUCTION Neuf
- COULEURS Bleu, Noir
Produits similaires dans la catégorie qui peuvent vous intéresser

Prix sur demande
Vendu par : EQUIP INDUSTRY
Vendeur certifié
Pique carotte Alpha Robotic 850/250 - Pique carotte Alpha Robotic - Pique carotte pneumatique - Course axe Z : 850 mm - Course axe Y : 250 mm - Rotation 45° - Programmation par apprentissage - Très simple d'utilisation - Catégories : EQUIPEMENTS PERIPHERIQUES NEUFS, Robotisation, automati
Voir le produit

Prix sur demande
Vendu par : SCALLOG
Le robot Boby est un robot logistique intelligent piloté en wifi par le logiciel Scallog - MAS. Il soulève et transporte les étagères de produits, de leur emplacement de stockage vers des stations de préparation de commandes. - Capable de supporter une charge utile maximale de 600 kg, le robot
Voir le produit

Prix sur demande
Vendu par : ROBOCOL
Vendeur certifié
Rapide, économique et de grande précision, cette table peut être utilisée dans le dosage, le vissage, l'assemblage, le remplissage... - Sa programmation est facile grâce à un boitier d'apprentissage. - Domaine d'utilisation : - Automobile - Electronique - Plasturgie - Cosmétique - Phar
Voir le produit

Prix sur demande
Vendu par : EXELMAT
Vendeur certifié
Le ROBBY 420 dispose de 4 fonctions électriques dont le déplacement latéral et le basculement. Ses roues souples lui permettent une facilité de transport des vitrages sur chantier. Ses batteries lui assurent une autonomie de 16 heures. - Caractéristiques Techniques: - Capacité : De 420kg à
Voir le produit

Prix sur demande
Vendu par : ROBOCOL
Vendeur certifié
Compacte, cette machine peut aussi bien servir pour le dosage que la manipulation, l'assemblage, le vissage, le soudage, e dépose de colle... Grâce à l'intégration d'un porte outil. Son usure est très faible. - Domaine d'utilisation : - Automobile - Electronique - Plasturgie - Pharmaceutiq
Voir le produit

Prix sur demande
Vendu par : EXELMAT
Vendeur certifié
Puissant, compact et léger, le WINLET 600 dispose de 4 fonctions hydrauliques. Sa tête porte ventouse bascule à 180° lui permettant un retournement complet des panneaux. - Caractéristiques Techniques: - Capacités : De 600 kg à 300 kg bras principal développé, 300 kg porte ventouses en pos
Voir le produit

Prix sur demande
Vendu par : Accelonix
Processus de vernissage maîtrisé - Robot compact facilement intégrable en ligne ou en îlot - Dimensions maximales des PCB : - L x l x H : 400 x 450 x 80 mm - Jusqu'à 2 laqueurs dans un seul robot - Accessibilité optimale : Buse étroite sur 80 mm de hauteur - Valve Stream - Coat® unique
Voir le produit

Prix sur demande
Vendu par : EXELMAT
Vendeur certifié
Puissant et précis, le WINLET 575 dispose de 6 fonctions hydrauliques dont le déplacement latéral et la rotation. - Sa tête porte ventouse bascule à 180° lui permettant un retournement complet des panneaux, utile pour l'atelier. - Il possède une fonction “gyroscopique” qui g
Voir le produit

Prix sur demande
Vendu par : EXELMAT
Vendeur certifié
Puissant et précis, le WINLET 785 dispose de 6 fonctions hydrauliques dont le déplacement latéral et la rotation. Sa tête porte ventouse bascule à 180° lui permettant un retournement complet des panneaux. - Caractéristiques Techniques: - Capacités : De 785 kg à 100 kg bras principal déve
Voir le produit

Prix sur demande
Vendu par : EXELMAT
Vendeur certifié
Le ROBBY 280 dispose de 4 fonctions électriques dont le déplacement latéral et le basculement. Ses roues souples lui permettent une facilité de transport des vitrages sur chantier. Ses batteries lui assurent une autonomie de 16 heures. - Caractéristiques Techniques: - Capacités : De 280 kg �
Voir le produit

Prix sur demande
Vitesse de course extérieure continue maximale à 3,3 m/s (11,88 km/h). Le robot quadrupède de petite et moyenne taille le plus rapide et le plus stable du marché. (Record du monde : 3,7 m/s sur un tapis roulant par le MIT) Avec le potentiel d’être un excellent compagnon de jogging. - INFORMA
Voir le produit

Prix sur demande
Le robot marche aux côtés de son maître humain, ce qui est mieux qu’un mode de suivi conventionnel. En outre, l’interaction homme - machine est à la fois harmonieuse et sûre. Ne vous inquiétez pas pour le robot puisqu’il est juste à côté de vous. Capable d’aider le robot à choisir
Voir le produit